首都高の点検により培った点検技術により確実なインフラ点検を行います。
特に、ロボティクスやデジタル画像撮影技術を駆使して点検困難箇所の点検に挑戦します。

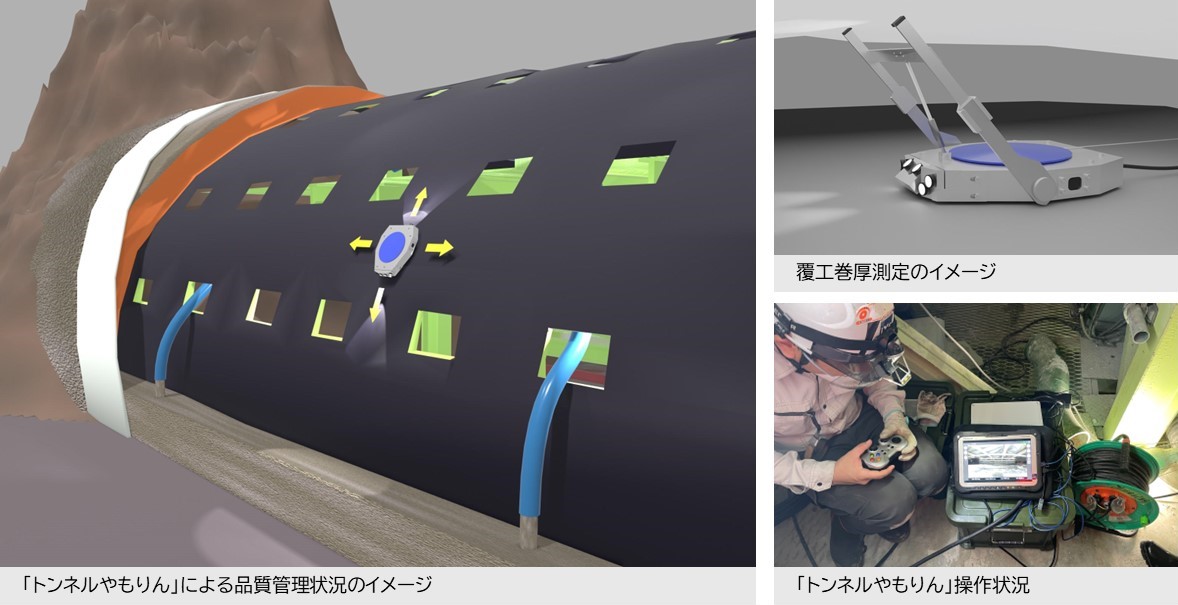
トンネルやもりん ~トンネル覆工コンクリートの打設状況を確認するロボット~
トンネルの覆工コンクリート施工は、地山と移動式型枠(セントル)の離隔が300mm程度と狭隘なことから覆工コンクリートの打設状況の確認が困難な場合があります。覆工コンクリートの打設状況や品質を検査するために、移動式型枠(セントル)に吸着しながら走行及び撮影等を行うロボット「トンネルやもりん」を開発しました。(特許第7577238号)
トンネルやもりんの特徴
- 親機と子機で構成されたロボットをICT端末で制御し、コンクリートの打設状況を確認。
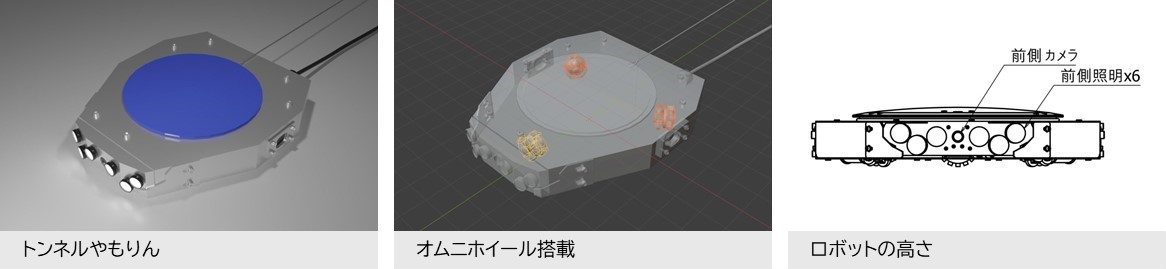
- 子機は、ネオジム磁石でセントルに吸着、オムニホイールにより前後左右に移動しながら、4方向に搭載したカメラで映像を常時取得。コンクリートの打設状況を映像で監視。
- ロボットの高さは70mm、配筋部においても鉄筋に干渉することなく走行。
- ロボットの位置や覆工巻厚をICT端末で常時確認。
仕様
- W340×D390×H70(mm)
- ロボットの4辺(前後・左右)にLED照明とカメラを搭載
- ロボット本体に搭載した平型のネオジム磁石で移動式型枠(セントル)吸着
- オムニホイールとタイヤ型ネオジム磁石により全方向に移動
使用状況

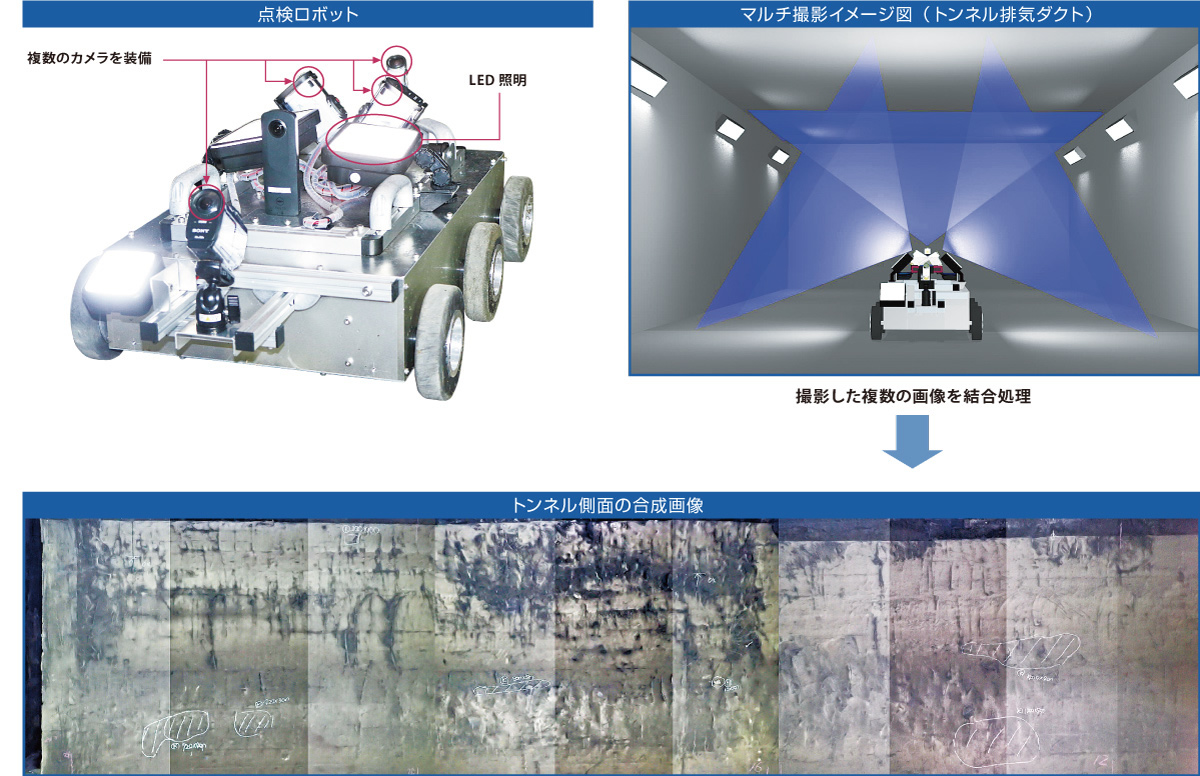
ロボットによるマルチ撮影
トンネル換気ダクト等の点検作業困難箇所において、各壁面を同時に短時間で撮影することが可能です。
各種点検ロボットによる点検困難箇所の点検
点検員が入り込めない狭隘部や、粉塵・排気ガス等の影響下にある点検困難箇所などにおいて、 ロボットを使用した点検を行います。
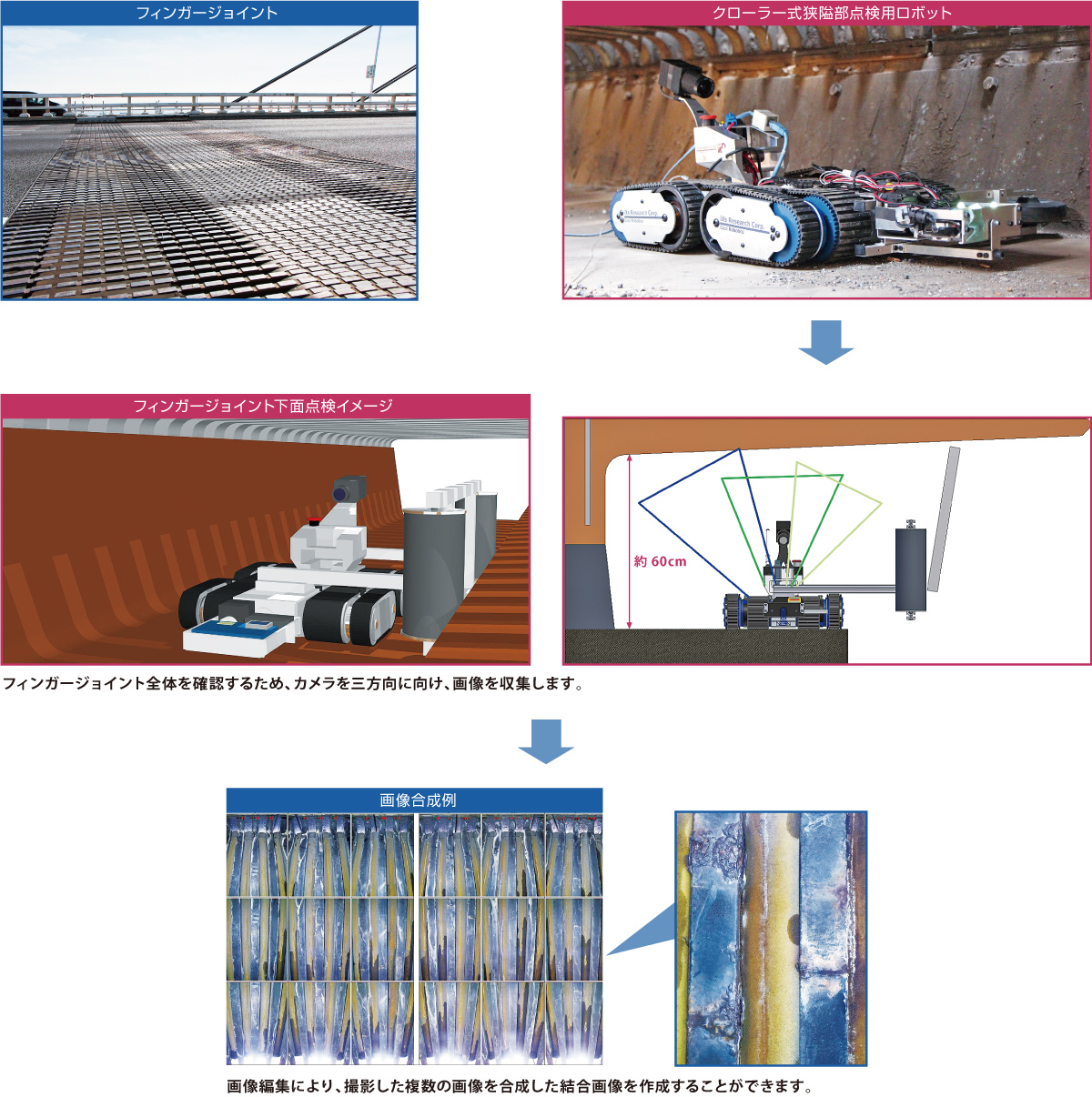
フィンガージョイント下面の点検
長大橋のフィンガージョイント部の下面に入り込み、フィンガージョイントの健全性を確認します。
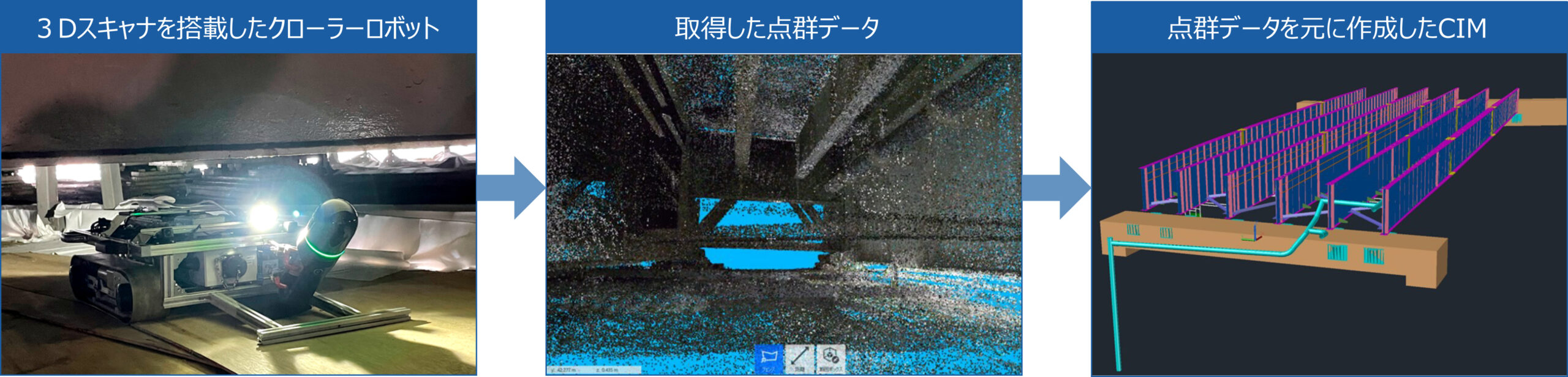
狭隘部(鋼桁下ルーバー内)での3D点群取得
汎用クローラーロボットに3Dレーザスキャナを搭載し、点群データを取得します。
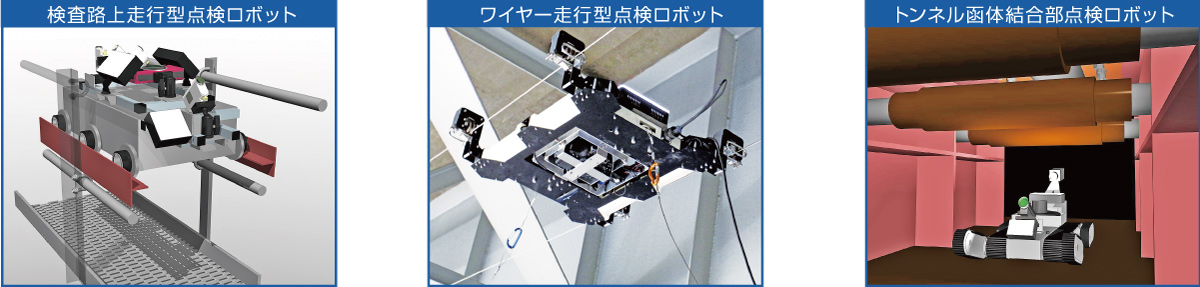
新規ロボットの開発
接近困難箇所や狭隘部等において、各点検箇所の現場条件に運用可能な撮影ロボットを開発しています。
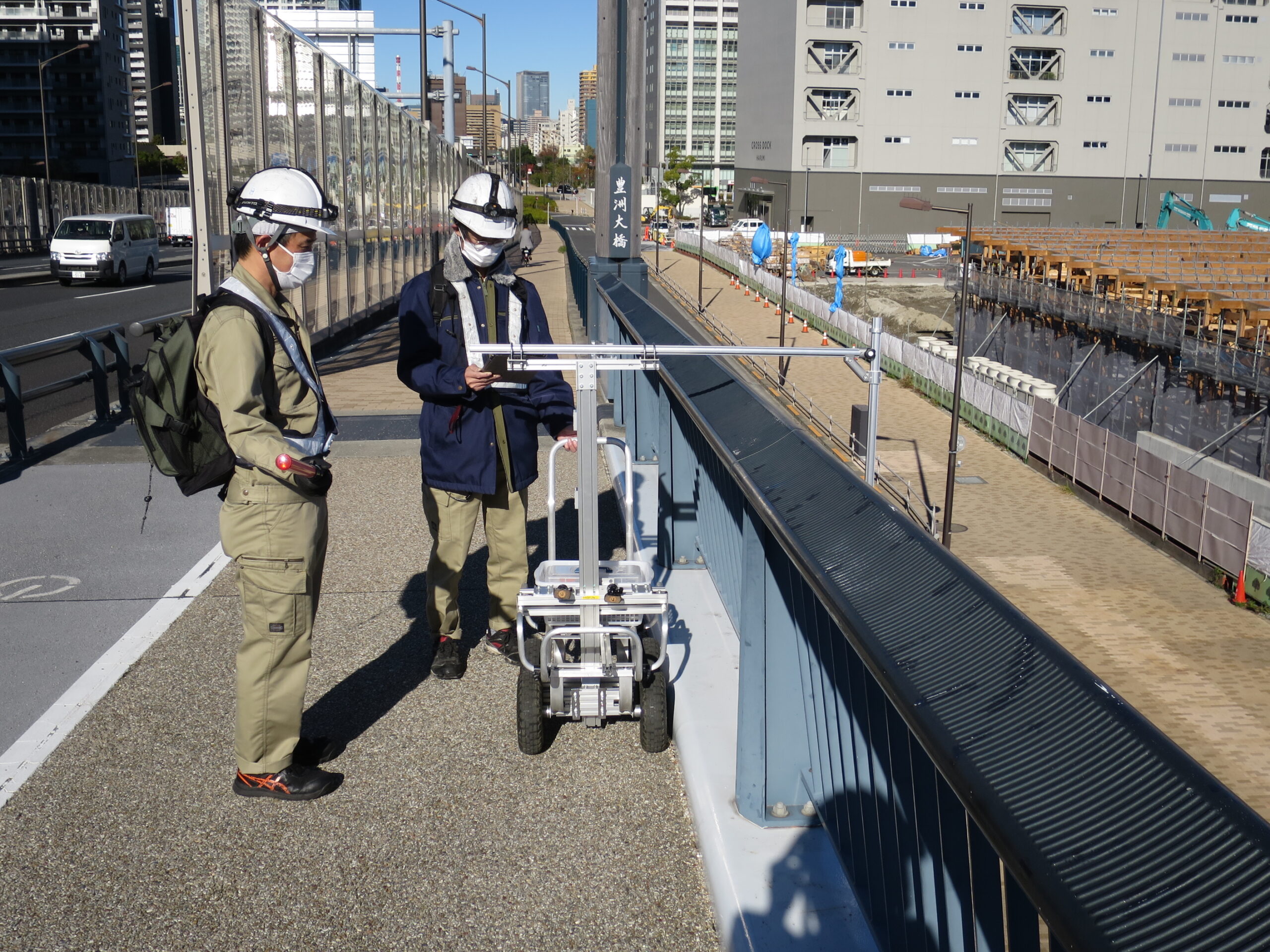
デジタル撮影による構造物点検
望遠撮影からマクロ撮影まで、 各種デジタルカメラにより高画質の損傷画像を撮影します。
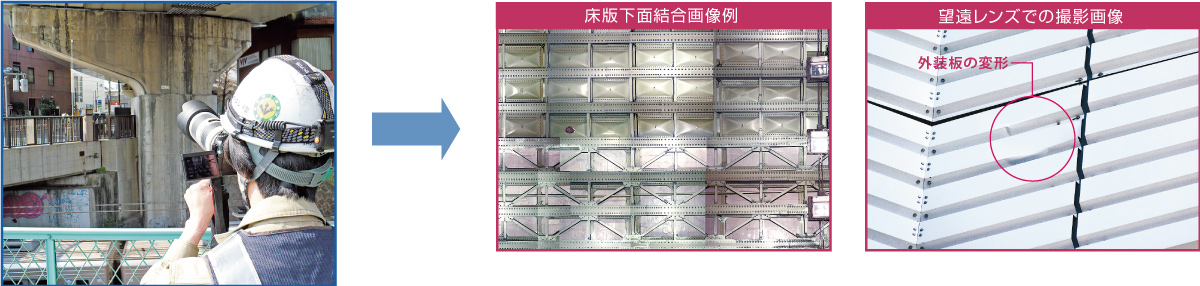
一般損傷写真撮影
望遠レンズ、広角レンズ、標準ズームレンズにより構造物の損傷を撮影します。
撮影画像を幾何学的に補正処理を行い、結合することで、構造物全体の損傷画像を作成できます。
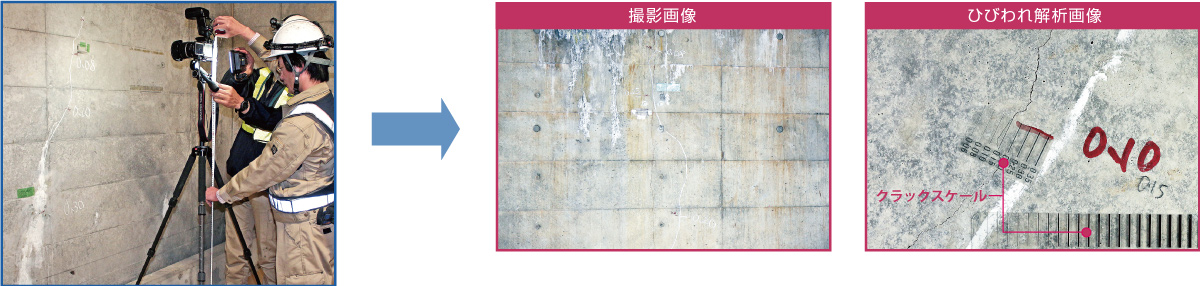
ひびわれマクロ撮影
マクロレンズを使用して構造物の詳細な画像を記録します。
損傷画像とクラックスケールを画像合成し、正確なひびわれ幅を測定します。
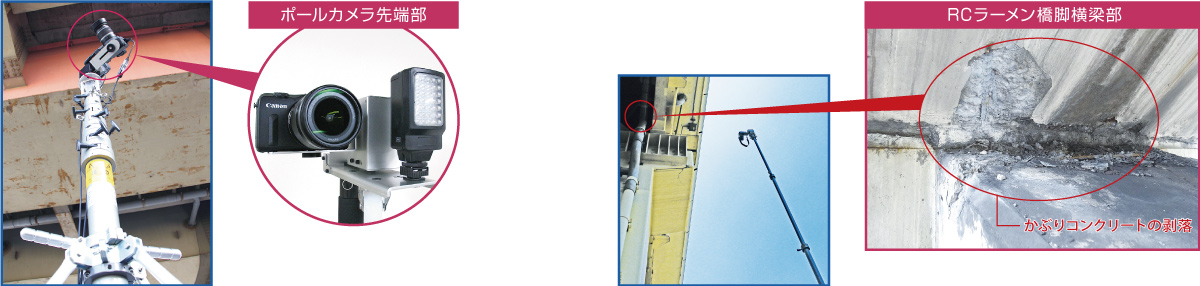
ポールカメラによる撮影
高所や狭隘部にある構造物の点検を支援するツール。各種アルミフレームに取り付けたデジタルカメラで撮影し健全性を確認します。


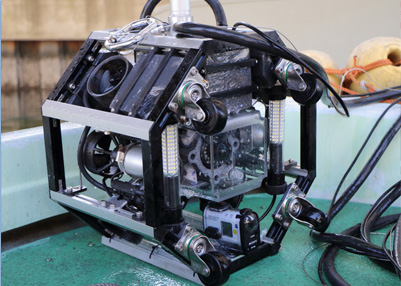
水中部の調査
これまで主に潜水士によって行われていた水中構造物点検の効率化とコスト削減のため、船上から操作できる水中調査機器を一般財団法人 首都高速道路技術センターと共同開発しました。【特許第7020640号】
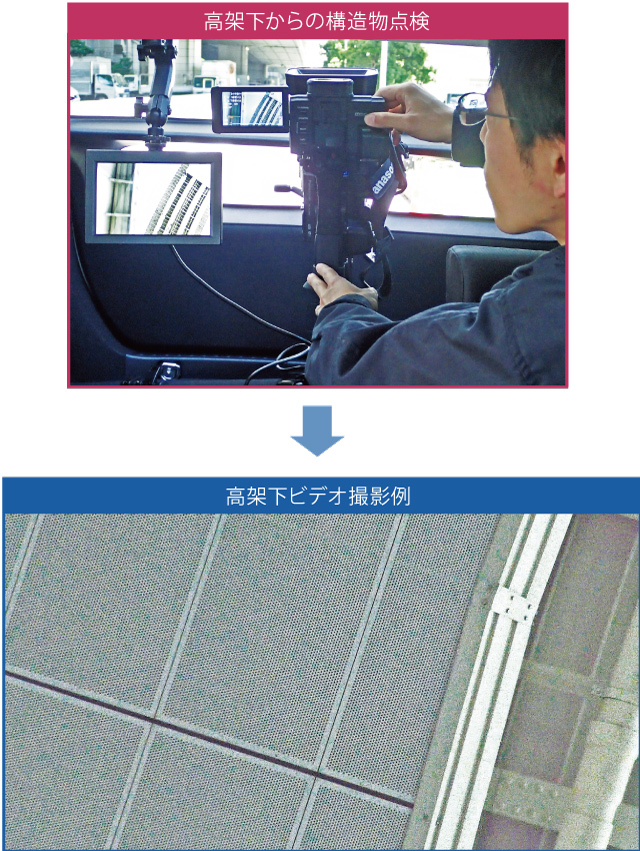
走行車両からのデジタルビデオ撮影
走行車両からの各種デジタルビデオ撮影により、構造物の損傷を記録します。
車載ビデオカメラによる撮影
法定速度で走る車上から各種デジタルビデオで構造物を撮影し、その健全度を判定します。

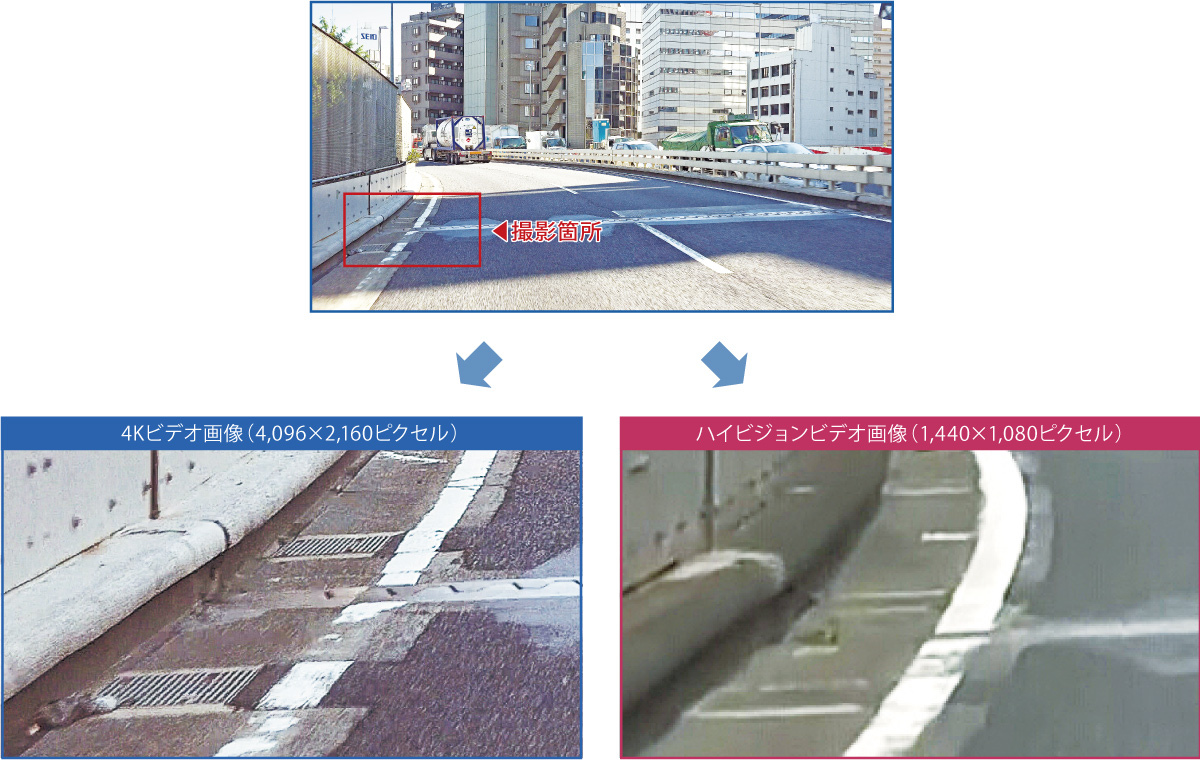
4Kカメラによる解析
4Kカメラを使用し、その詳細な画像で構造物の健全度を解析します。
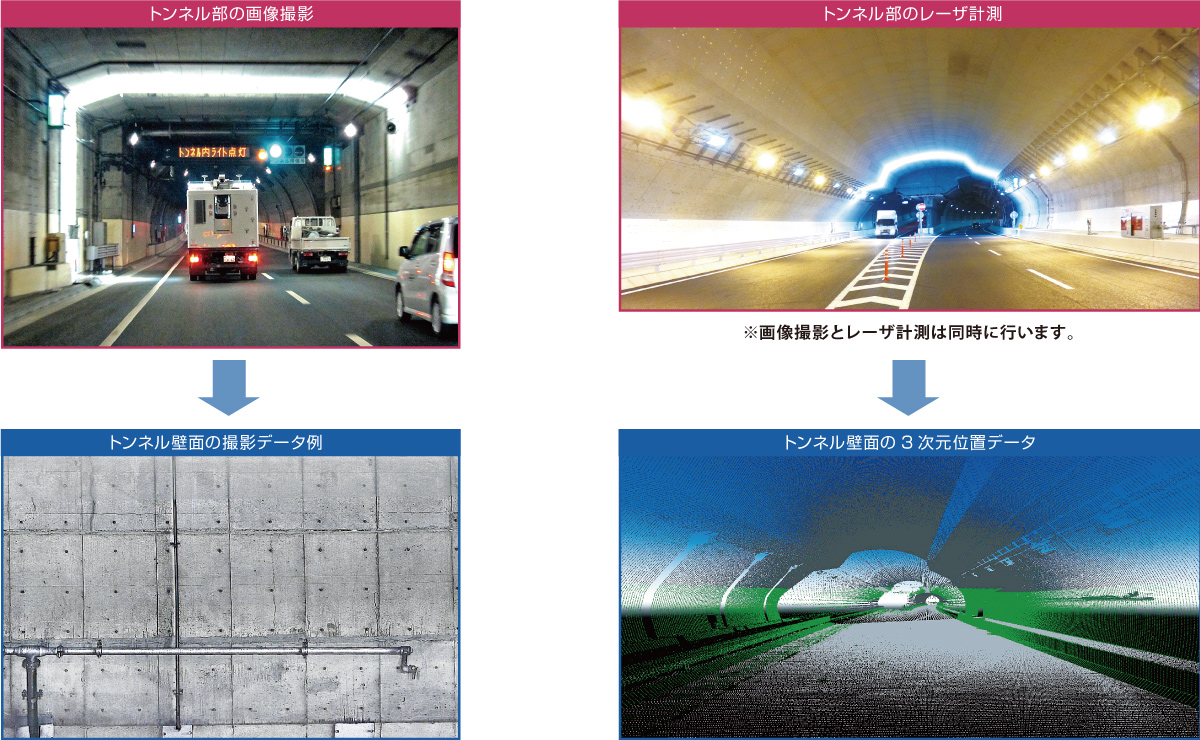
走行型計測車両によるトンネル点検
走行型トンネル点検車〈MIMM〉により、トンネルへ壁面の損傷を記録します。
この技術を応用し、高架橋下面の損傷も記録します。
トンネル部の点検
法定速度で走る車上から複数のデジタルビデオカメラで構造物を撮影し、健全度を判定します。
また、レーザー計測によりトンネル壁面の3次元位置データを収集し、壁面の変形等を計測します。
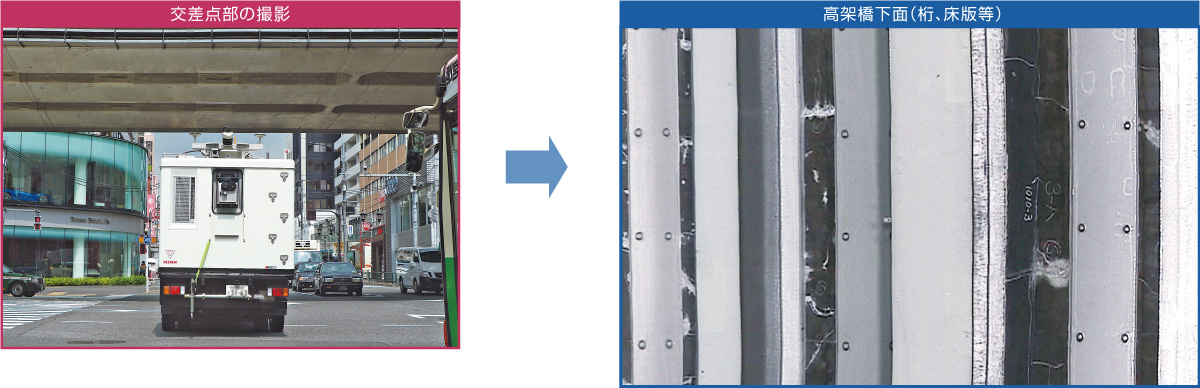
高架部の点検への応用
本計測車による計測技術を応用し、高架橋交差点部等の点検困難箇所の点検を実施します。
デジタル画像解析技術
各種デジタル画像解析技術により、損傷劣化の進行状況を定量的に判別することができます。
また、定量的な損傷状況の把握や損傷原因分析も可能となります。
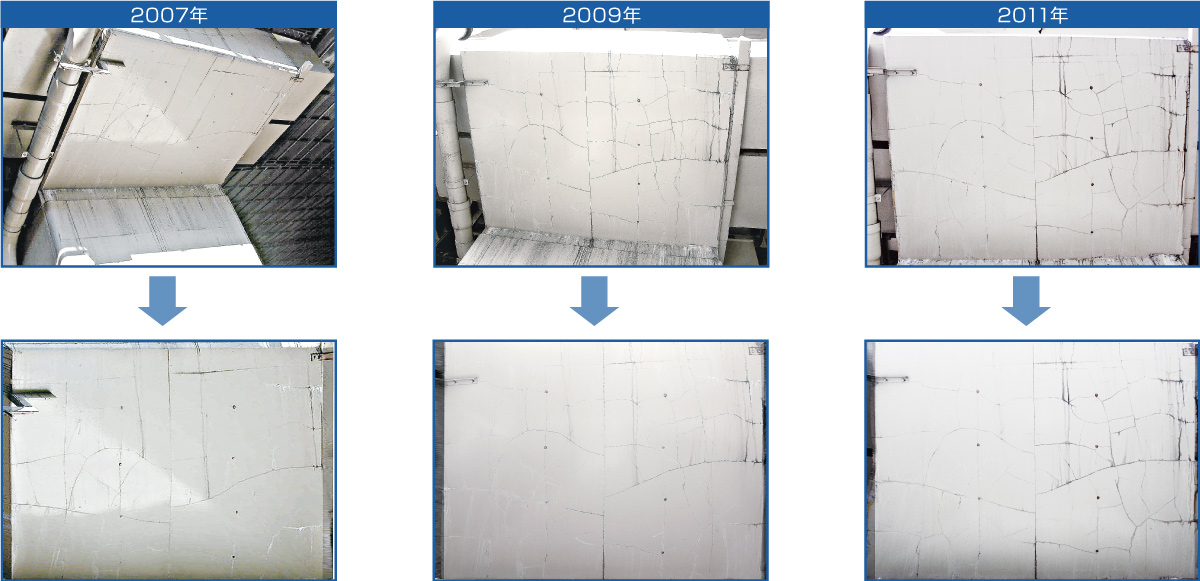
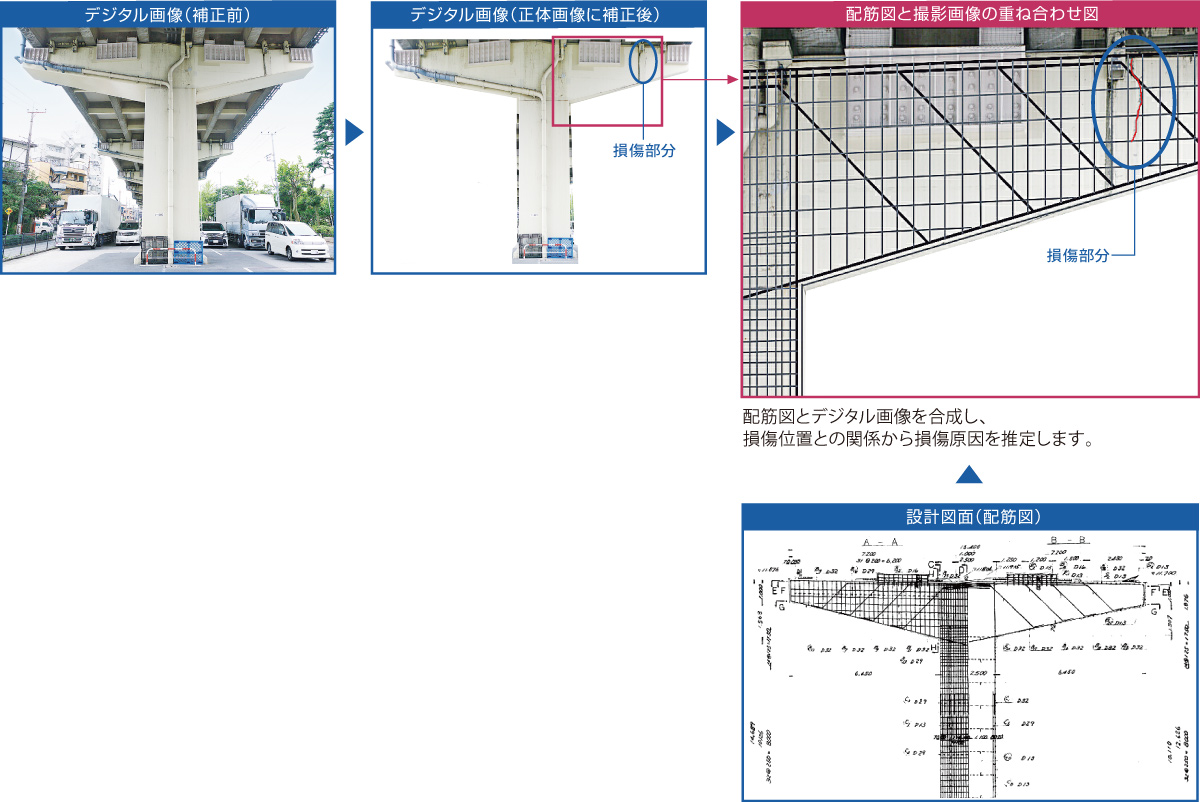
角度補正によるRC橋脚の損傷劣化判定
撮影角度や倍率が異なる損傷画像を幾何補正することにより、同一基準による定量的な経年比較が可能となります。
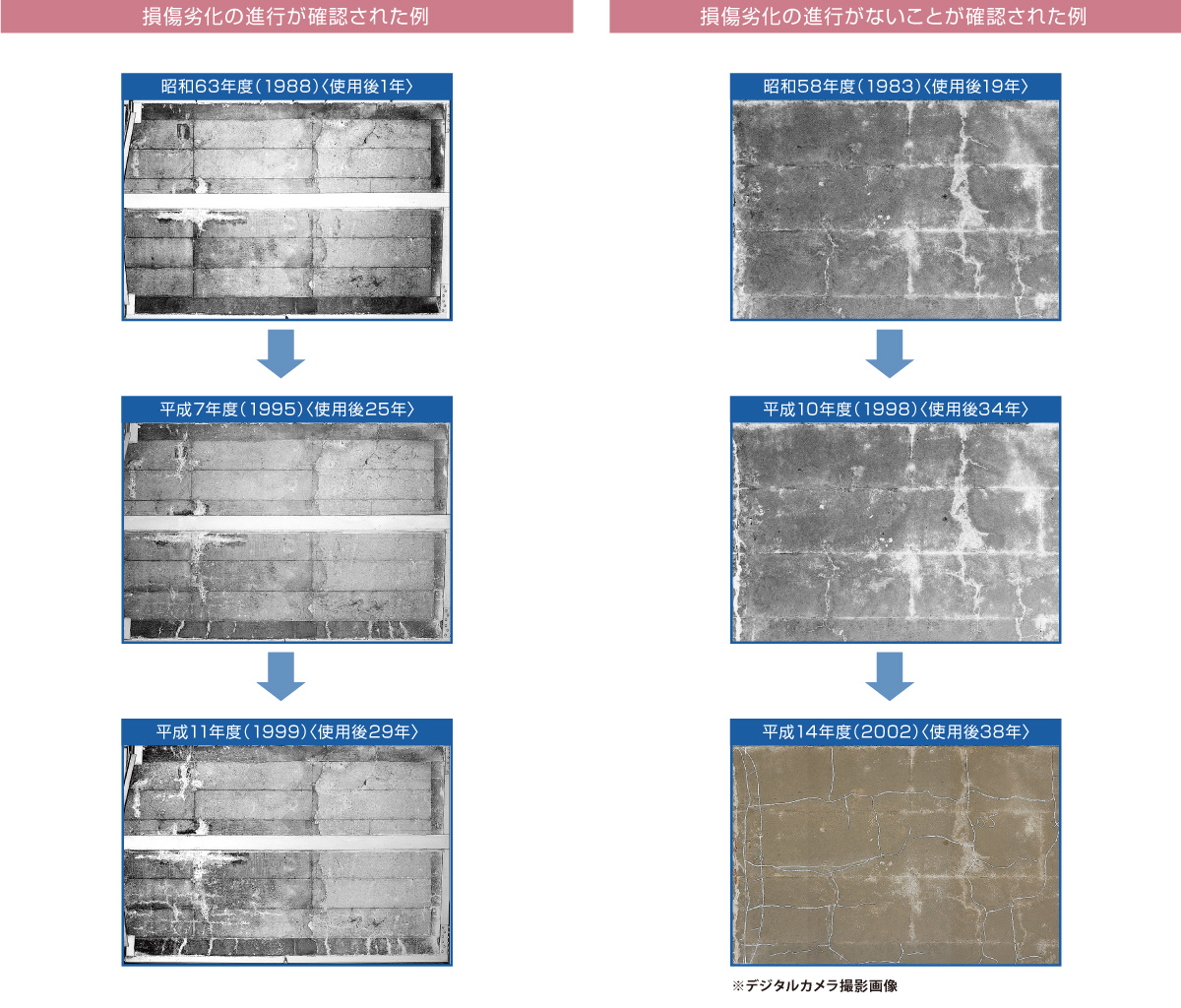
重ね合わせによるRC床版の損傷劣化判定
過去にネガフィルムで撮影された画像であっても、明るさ、倍率等を調整し、重ね合わせることにより、損傷劣化の進行を判定することができます。
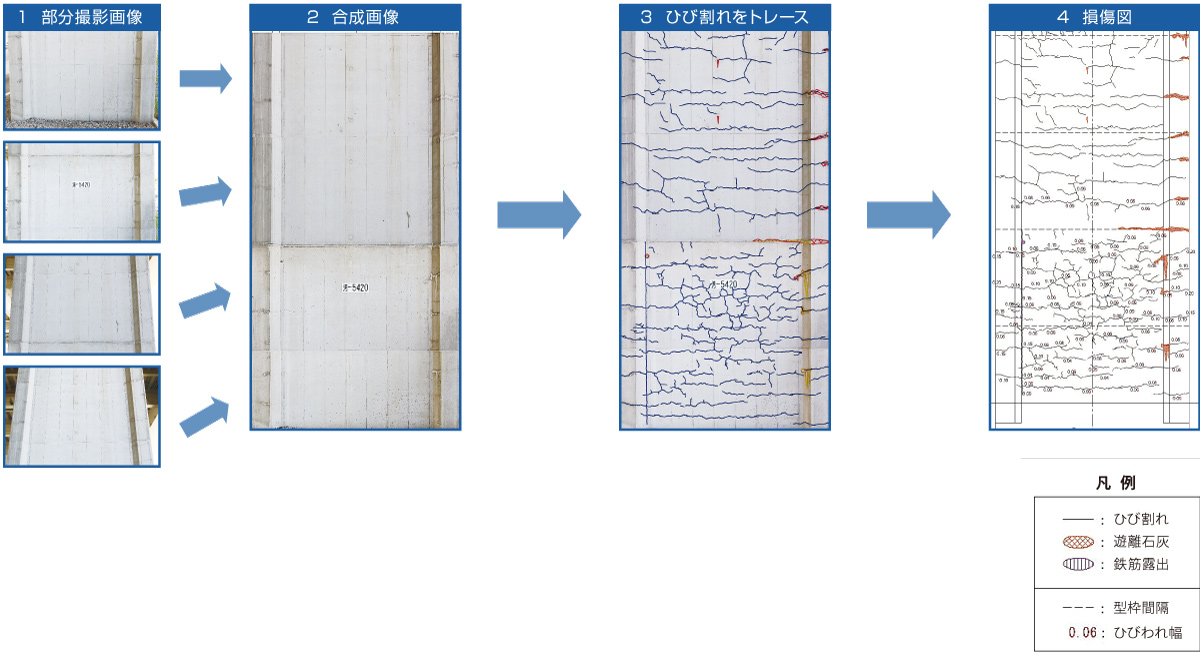
画像処理による損傷図作成
部分的に高精細に撮影した画像を幾何補正・結合し、合成画像を作成します。その合成画像から、詳細な損傷図を作成します。
点検困難箇所での点検事例
デジタルカメラを使用して、接近目視点検が困難な調査対象を遠方から正確に点検・調査を行います。
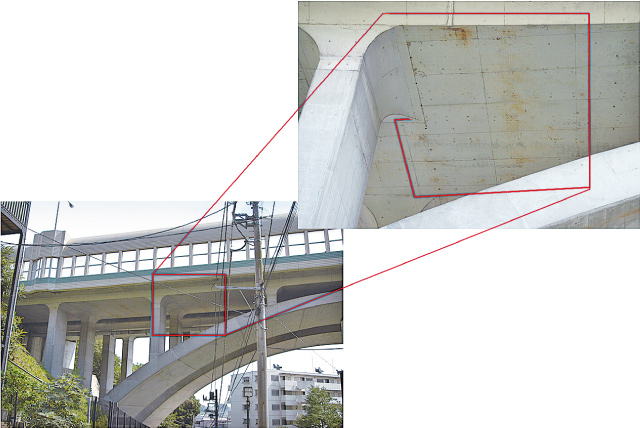
RCアーチ橋床版下面のデジタル画像点検
立地条件の制約や構造上の制約により、完成以来精度の高い点検が行われていなかったアーチ橋の床版面に対して、デジタルカメラによる構造物点検を実施し、詳細なひび割れデータの取得に成功しました。
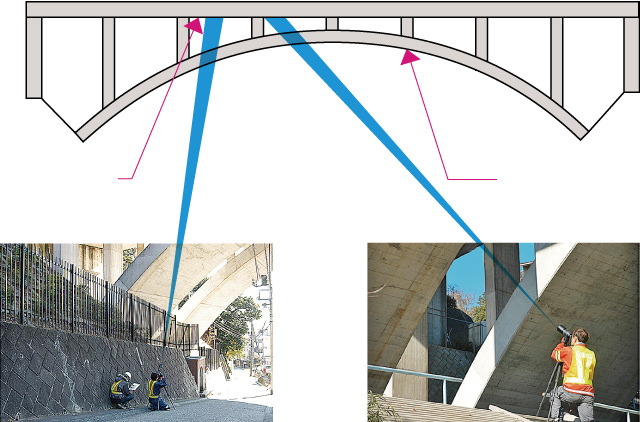
1⃣ 撮影状況
写真の様に、床版奥が死角となるため、3方向から撮影しました。
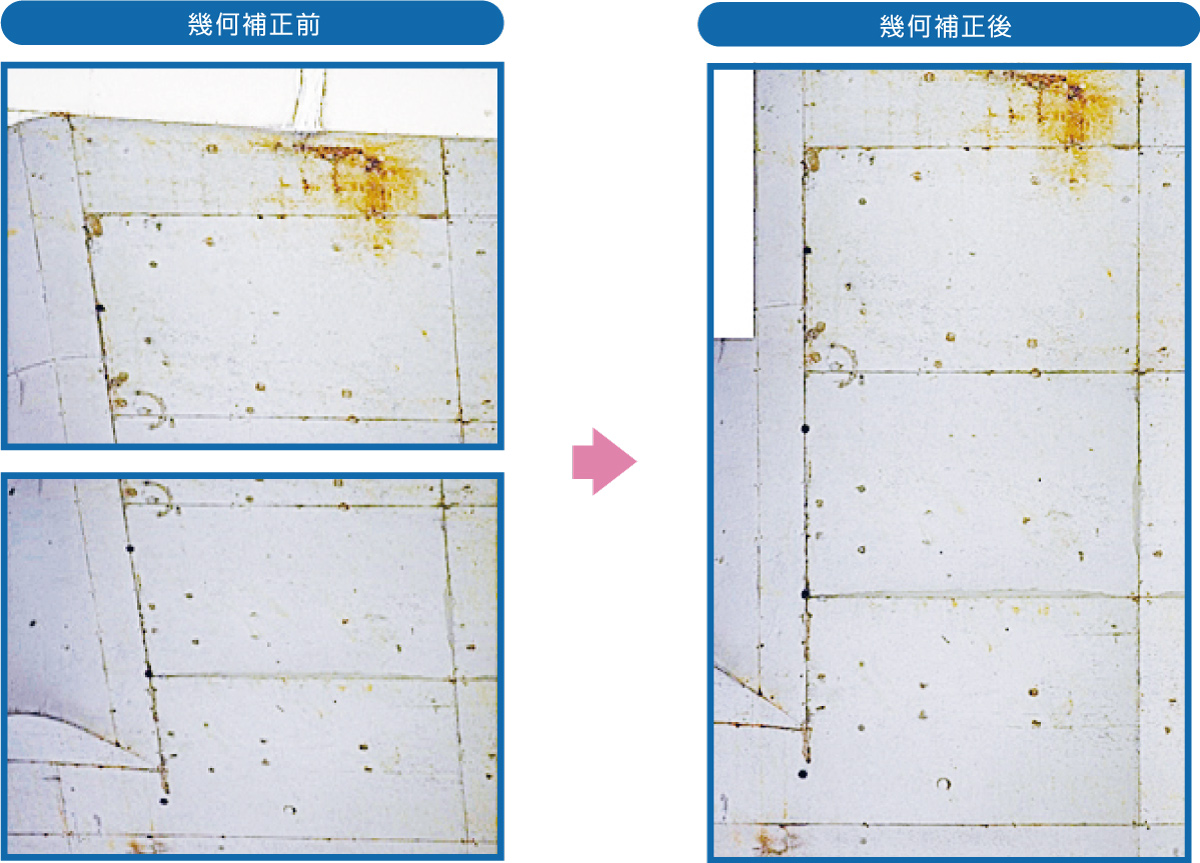
2⃣ 撮影画像
3方向から撮影した画像データは、床版全体を1つの画像にしたパノラマ合成するための幾何補正を施します。
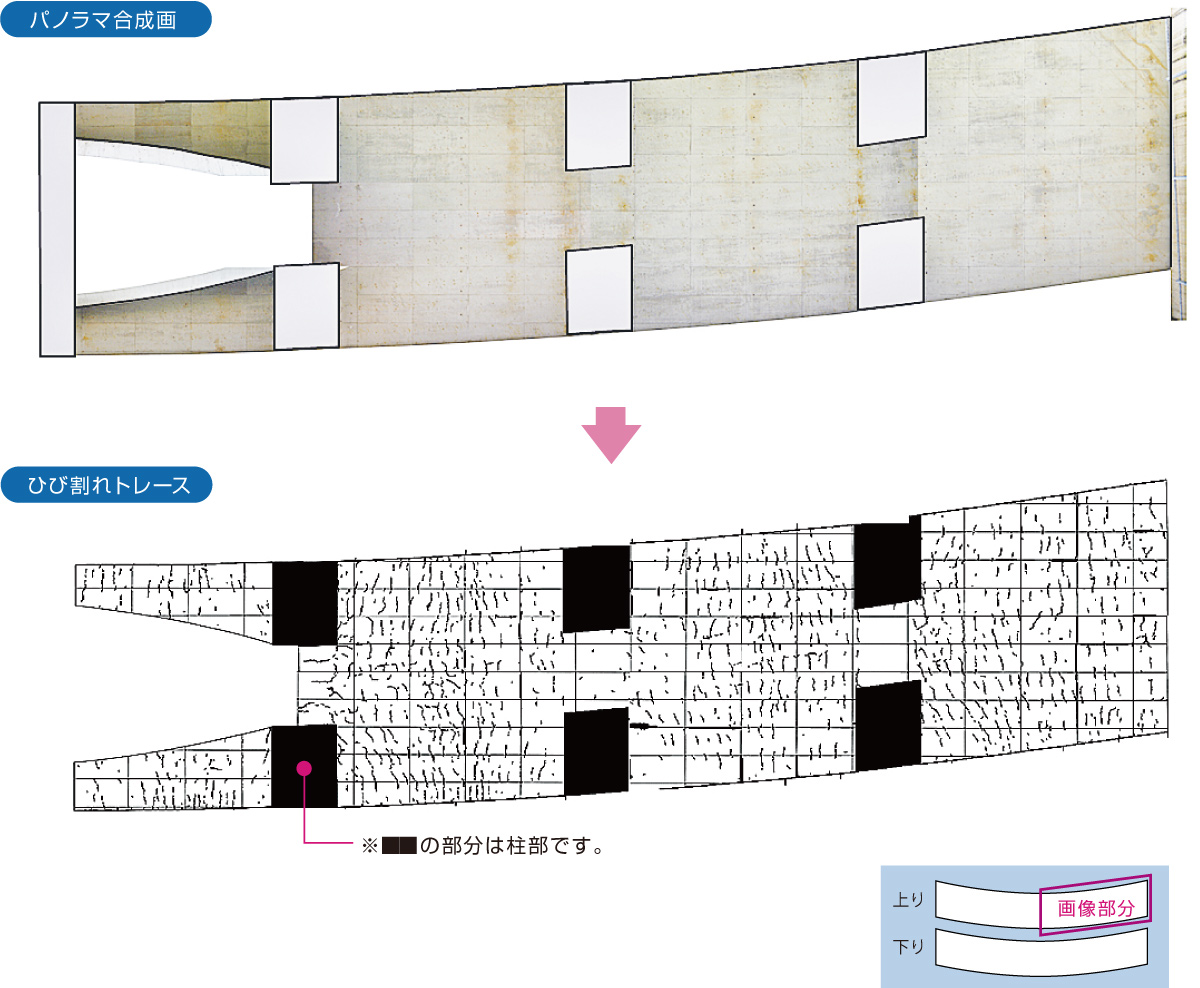
3⃣ パノラマ合成画像とひび割れトレース図
パノラマ合成画像をもとに、変状部分の正確なトレースを行い、画像の解析を行いました。
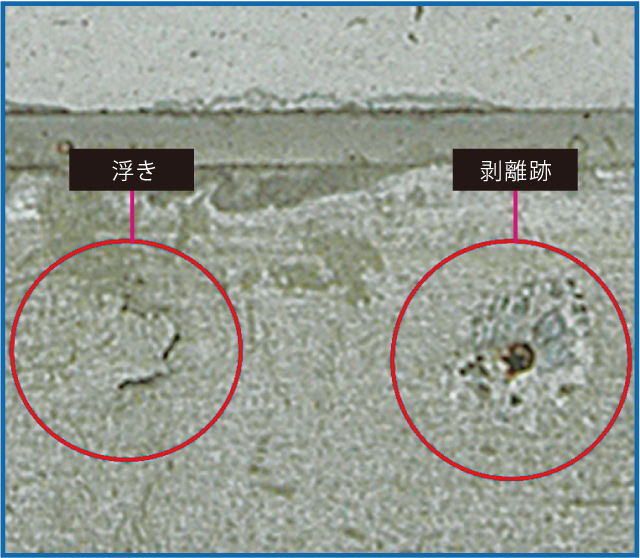
4⃣ 画像解析によって発見された損傷
高倍率レンズを使用した高彩度な撮影により、浮きや剥離跡等の損傷画像を取得することができます。